PhytoPatholoBot Next Generation - PPB-NG
Published:
The PPB-NG codebase, including navigation modules and data acquisition scripts is open-source here (under construction).

Overview
PhytoPatholoBot Next Generation (PPB-NG) is a field-deployable multi-modal robotic platform designed for high-throughput phenotyping in specialty crops. The system is built on a compact mobile base and integrates two hyperspectral cameras, one thermal camera, and one RGB camera, enabling synchronized acquisition of hyperspectral, thermal, and RGB imagery under natural and uncontrolled field lighting conditions. The robot supports real-time navigation and GPS-synchronized data logging, providing centimeter-level localization and precise geo-referencing of every image frame in vineyard environments.
Key Features:
- Multi-source sensing and multi-modal phenotyping for comprehensive canopy and disease characterization
- RTK-GPS and IMU for autonomous navigation and accurate geo-referencing of all collected imagery
The entire system is natively integrated within ROS2 and is engineered for rugged outdoor operation in vineyards. The data collected by PPB-NG enables scalable, objective, and repeatable field phenotyping studies at large spatial and temporal scales.
We are currently optimizing the PPB-NG and trying to release the upgraded version asap, please stay tuned!



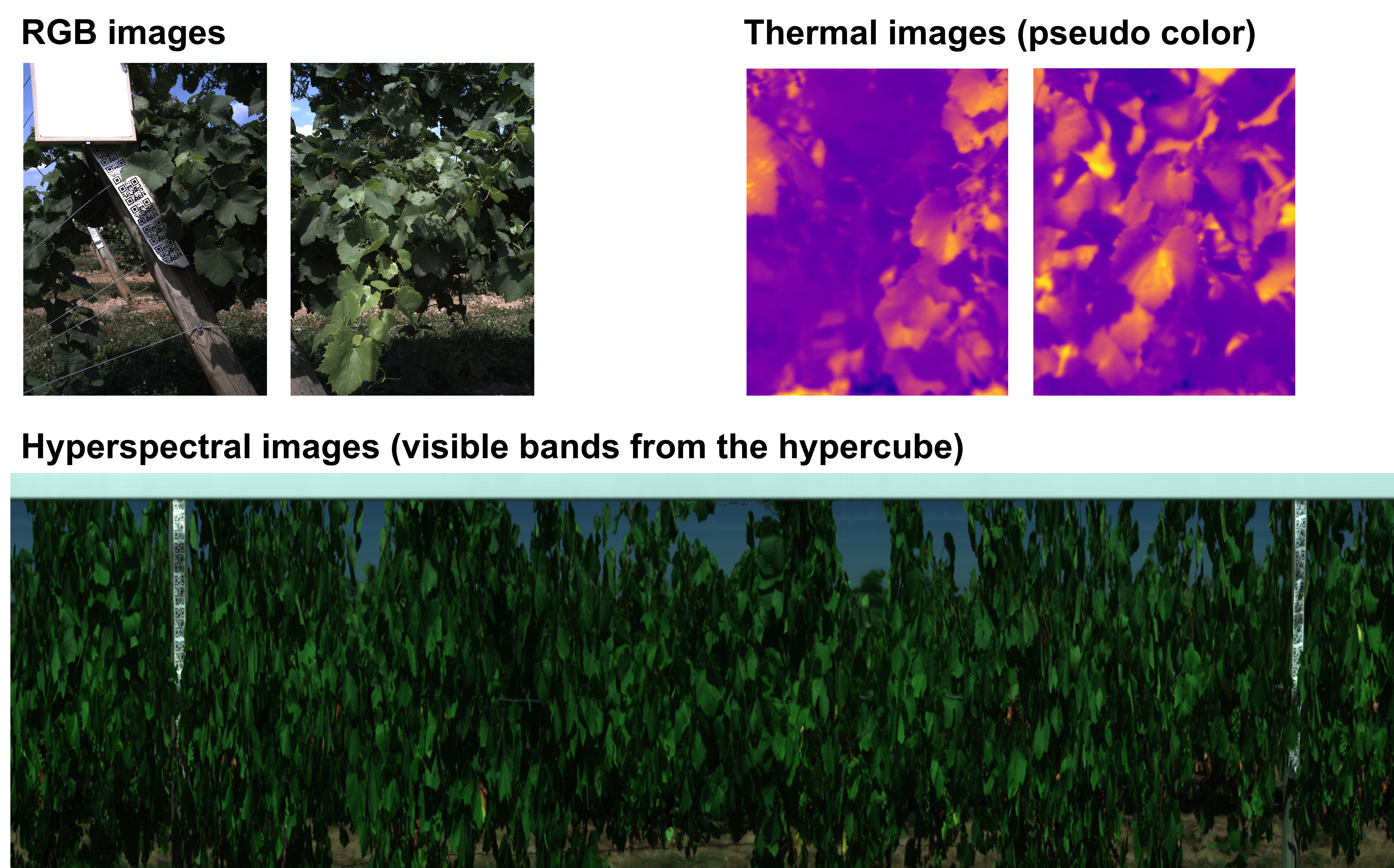
Collected Sample Data
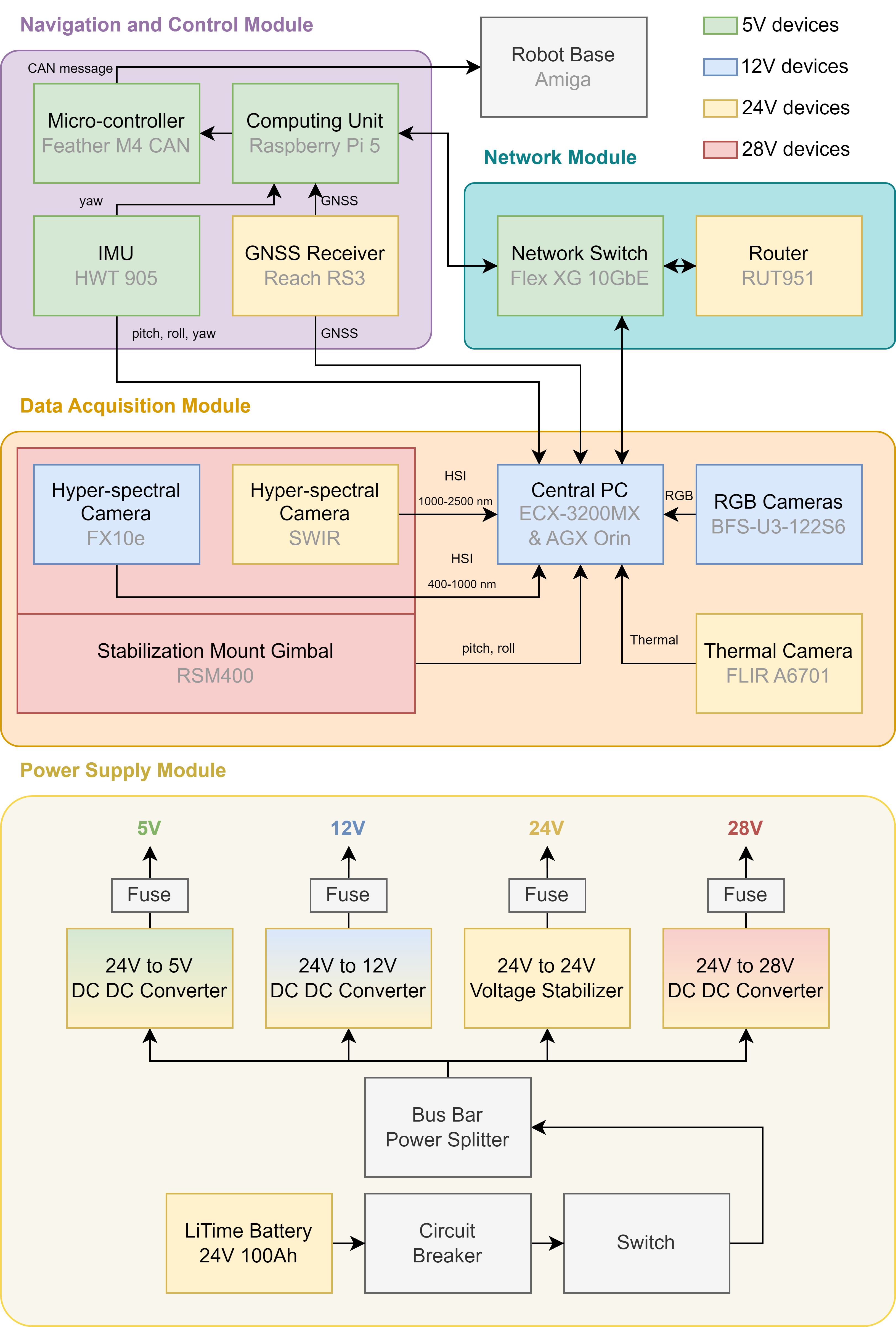
Modular Design
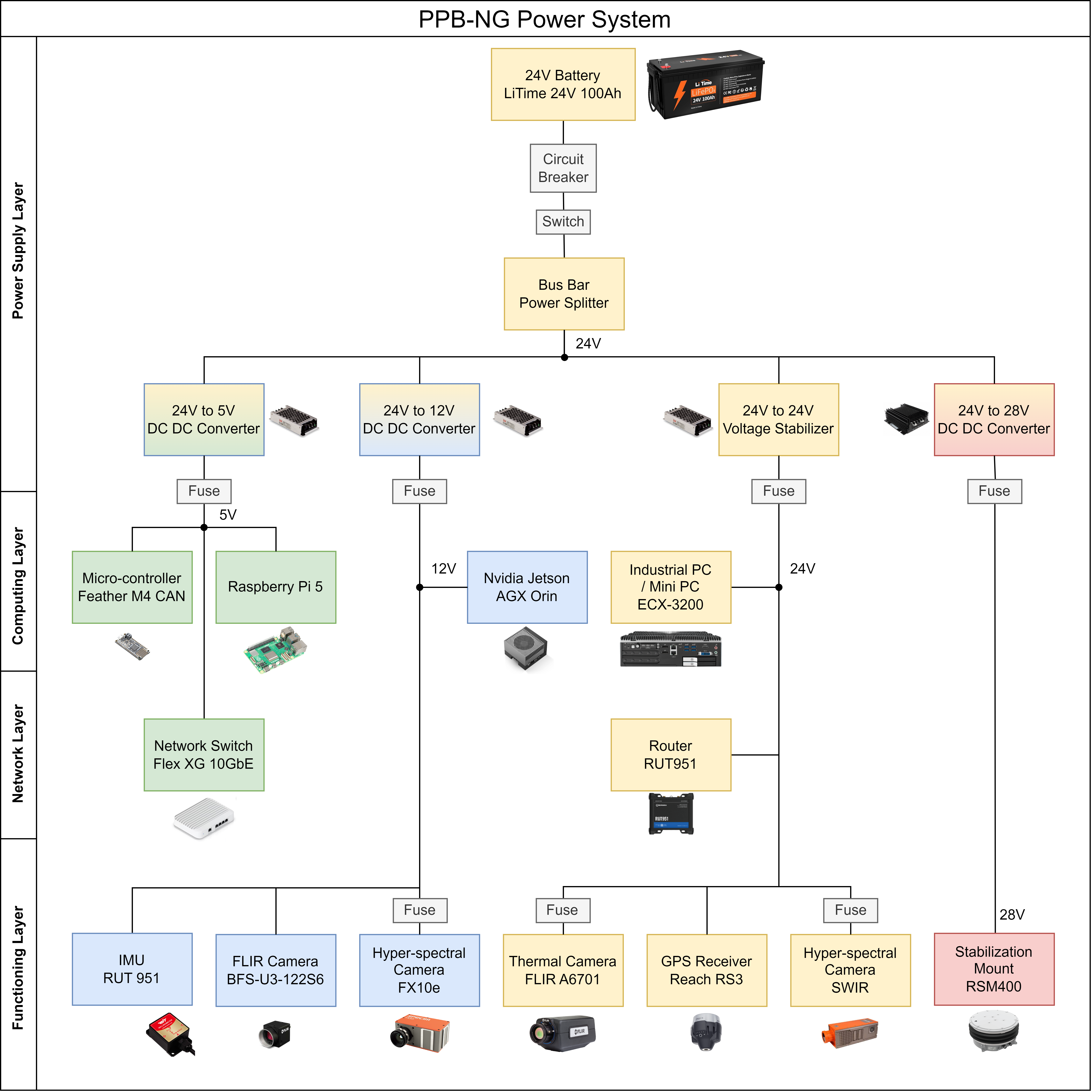
Power Design